Parameter, Algorithm and Nature
An immersive installation blending interactive generative animation, robotics, and electroacoustic sound, using industrial robots to bridge physical and digital realms.selected exhibition/recognition
- Asia Digital Art Award FUKUOKA: Interactive Art Finalist’s Award, JP, 2020
- ALIFE & ROBOTS Art Gallery-Conference on Artificial Life (ALIFE), Prague (Virtual). 2021.07.19-2021.07.23
- Parameter, Algorithm and Nature by NTHU BLD + NCTU ROLA, National Taiwan Museum of Fine Arts, Taiwan. 2020.08.15-2020.10.04
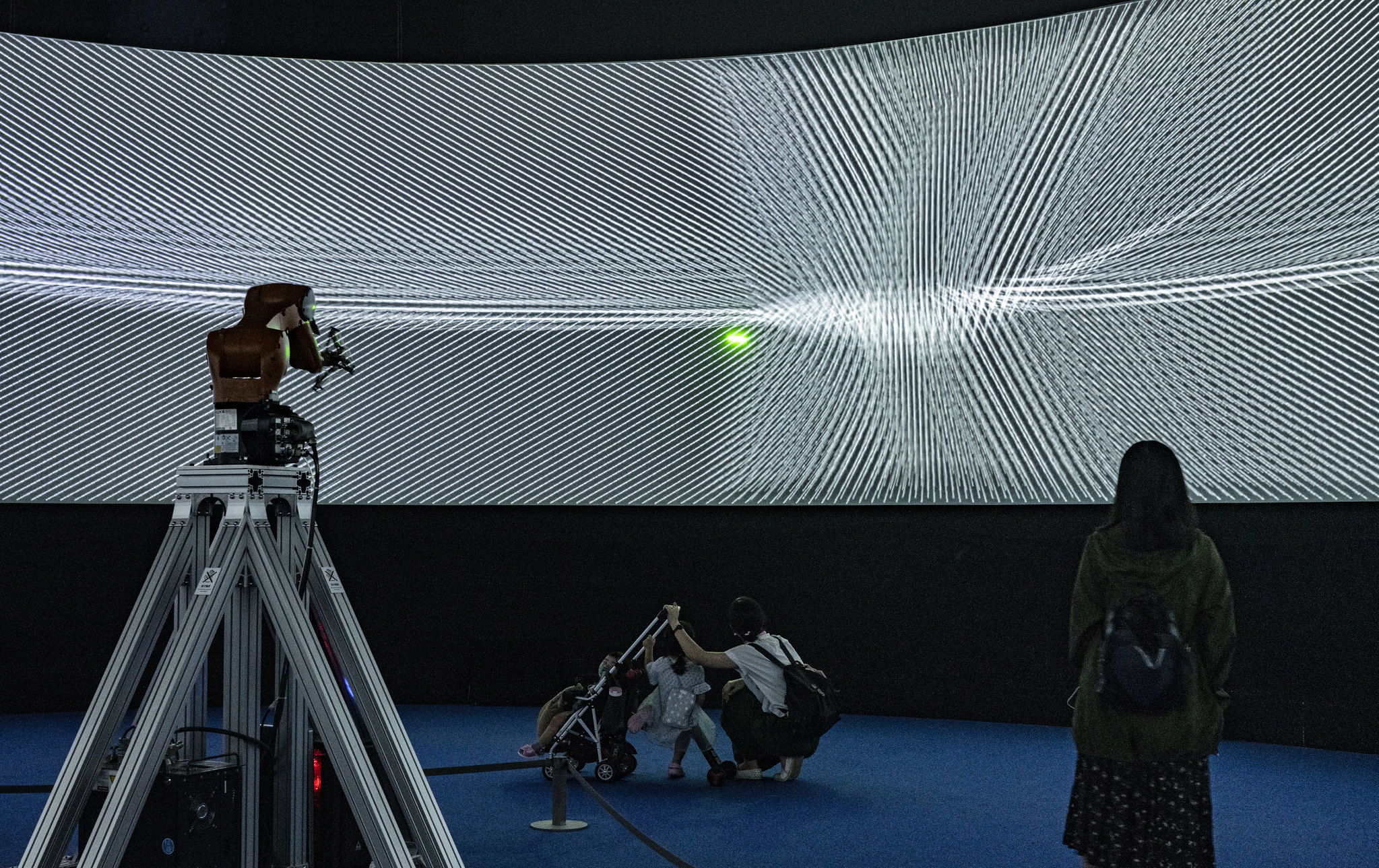
"Parameter, Algorithm and Nature" work is an installation of interactive animation, robotics and electroacoustic sound. This installation uses industrial robots as an in-between medium, interacting with Artificial Life creatures in projected screen, brings seamless communication from physical sculptural movement into virtual computational growing, morphology shifting and emerging swarm behaviors.
The technology boom brings new cognition of (human-computer) interaction, that artificial toward inanimate objects of technological character who intend to simulate real life, that changes and confuses human perception of nature in reality. The work "Parameter, Algorithm and Nature" wants to demonstrate this trend of “biomimetic media”, by using biologically-inspired computing to mimic natural growing processes, flower blessing, and the swarm behavior. The artificial life (A-Life) animation is act by real-time generated mechanism developed by math’s recursion, fractal tree, cellular automata. The industrial robot plays as an in-between medium, brings seamless interaction from physical performance into triggering virtual reactions of A-Life behavior, and brings a hybrid creation logic between “biologic design” and “biomimetic aesthetics.”
Overall, "Parameter, Algorithm, and Nature" is a testament to the intertwined relationship between technology and nature. It illustrates how digital tools and computational techniques can be used to emulate and extend the complexities of natural processes and forms. By blending robotic precision with organic fluidity, the installation invites viewers to reconsider the boundaries between the artificial and the natural, technology and biology, and to contemplate the evolving role of programming as a language in the realm of artistic creation.
 |




Related Document
---
該作品使用工業機器人結合360度環場投影的音像藝術,將機械手臂與虛擬影像同步互動,發展跨領域科技藝術表演。在蒲公英圖像表現的部分,藝術家運用數學對稱性、歸遞機制、碎形樹等邏輯,發展蒲公英仿生圖形的生長形態與開花的意象表現。在群體運動的部分,機械手臂透過工業化的機械動態,指揮著雷射光筆的指向與投射,與衍生藝術動畫即時通訊互動。藉由細胞自動機(cellular automata)的資訊傳遞機制,產生仿生性的群體運動效果,使得數以萬計的線條在交互重疊的視覺表現下,時以交互排斥、時以相互漣漪作用著的運動,表現凍結時空般的流體運動。在由生成規則和演算法產生的衍生動畫,與機械手臂精密機械又華麗的運動,以及詭異的電子聲響音樂背景中,展現了一種無違和感的人造自然場景。
All images and videos courtesy Scottie Chih-Chieh Huang.